|
I am a third-year master student in Mechanical Engineering at the CoalMine Robot Lab, China University of Mining and Technology, advised by Prof. MengGang Li. My research interests include LiDAR-Inertial Odometry and Multi-Sensor Fusion. I am particularly interested in leveraging UWB, LiDAR and Camera to achieve robust localization in extremely challenging environments. |

|
|
|
|
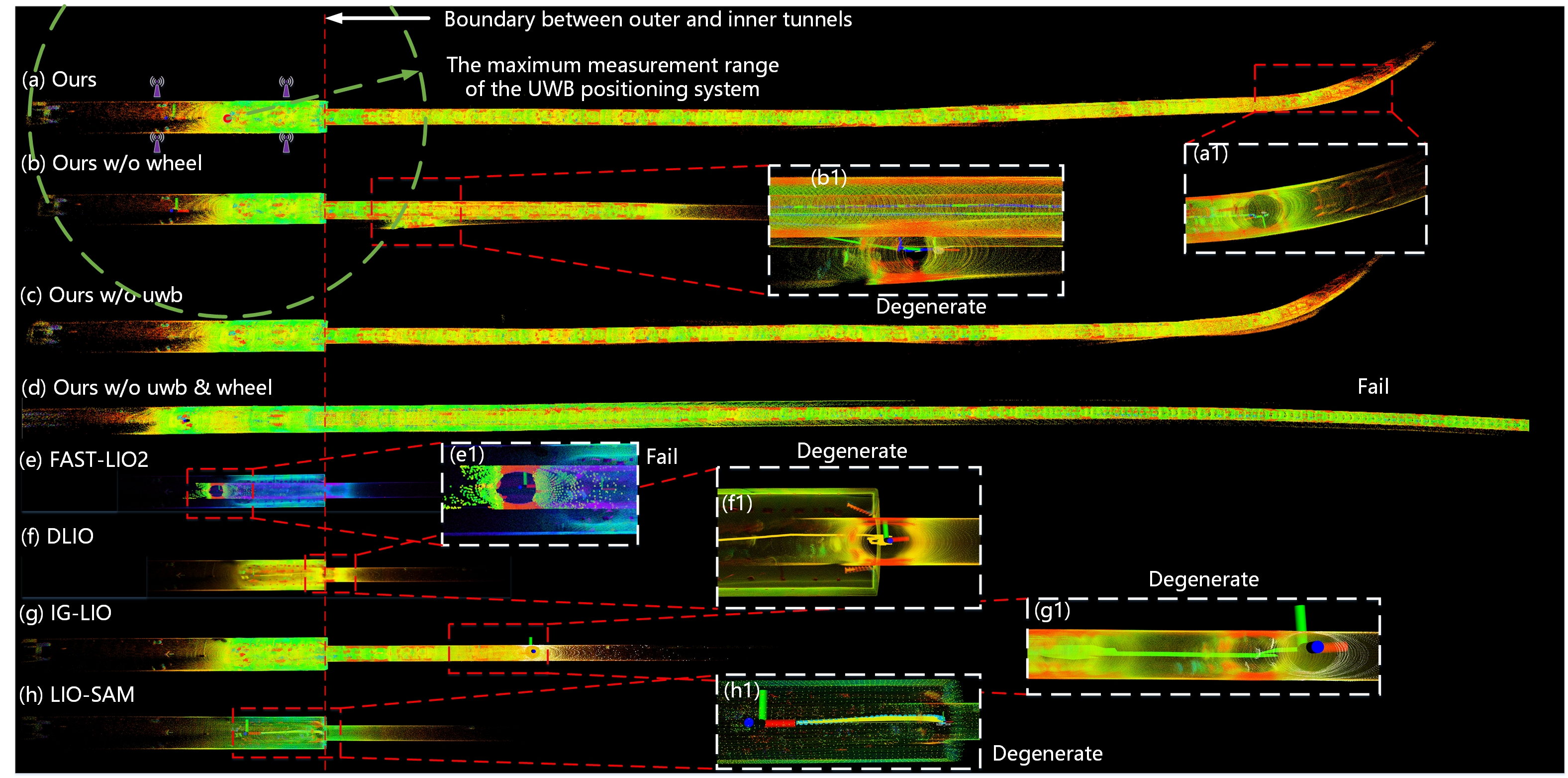
CM-LIUW-Odometry: Robust and High-Precision LiDAR-Inertial-UWB-Wheel Odometry for Extreme Degradation Coal Mine Tunnels
Kun Hu, Kun Hu, Menggang Li, Zhiwen Jin, Chaoquan Tang, Eryi Hu, Gongbo Zhou IROS, 2025 [arXiv] [code] Simultaneous Localization and Mapping (SLAM) in large-scale, GPS-denied coal mines is hindered by feature-poor tunnels, unreliable wheel odometry on rough terrain, and lack of global reference. To tackle these challenges, we present CM-LIUW-Odometry, a multimodal SLAM framework based on the Iterated Error-State Kalman Filter (IESKF). It tightly fuses LiDAR-inertial odometry with UWB for global alignment, integrates wheel odometry enhanced by nonholonomic constraints and lever-arm compensation for UWB-outage zones, and employs an adaptive motion-mode switching mechanism based on UWB coverage and environmental degradation. Real-world experiments show our method outperforms state-of-the-art approaches in accuracy and robustness. Code is publicly released on GitHub. |
|
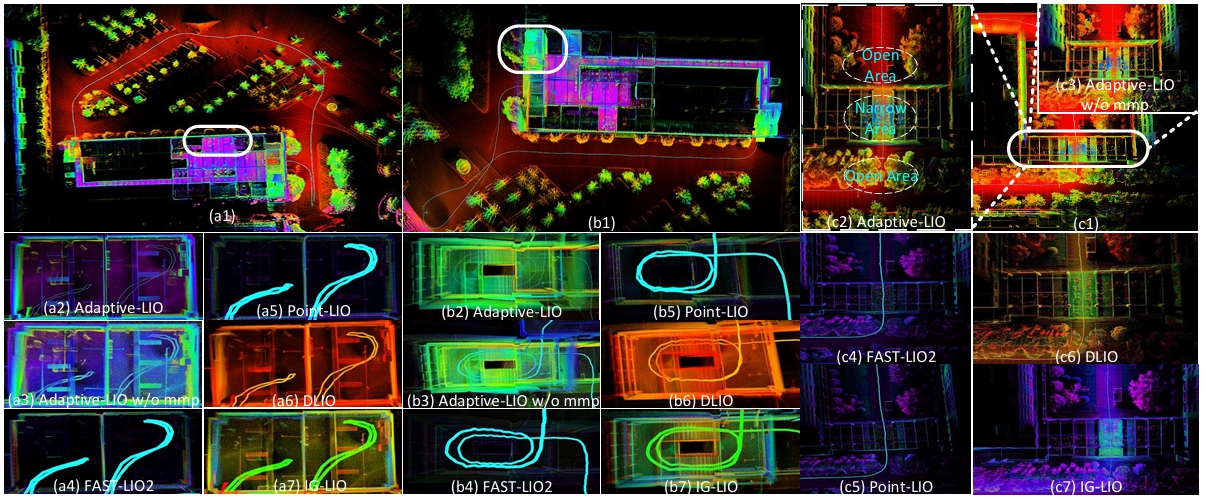
Adaptive-LIO: Enhancing Robustness and Precision through Environmental Adaptation in LiDAR Inertial Odometry
Chengwei Zhao, Kun Hu, Jie Xu, Lijun Zhao, Baiwen Han, Kaidi Wu, Maoshan Tian, Shenghai Yuan IEEE Internet of Things Journal (IOTJ), 2024 [arXiv] [code] We propose a loosely coupled adaptive LiDAR-Inertial-Odometry named **Adaptive-LIO**, which incorporates adaptive segmentation to enhance mapping accuracy, adapts motion modality through IMU saturation and fault detection, and adjusts map resolution adaptively using multi-resolution voxel maps based on the distance from the LiDAR center. |
|
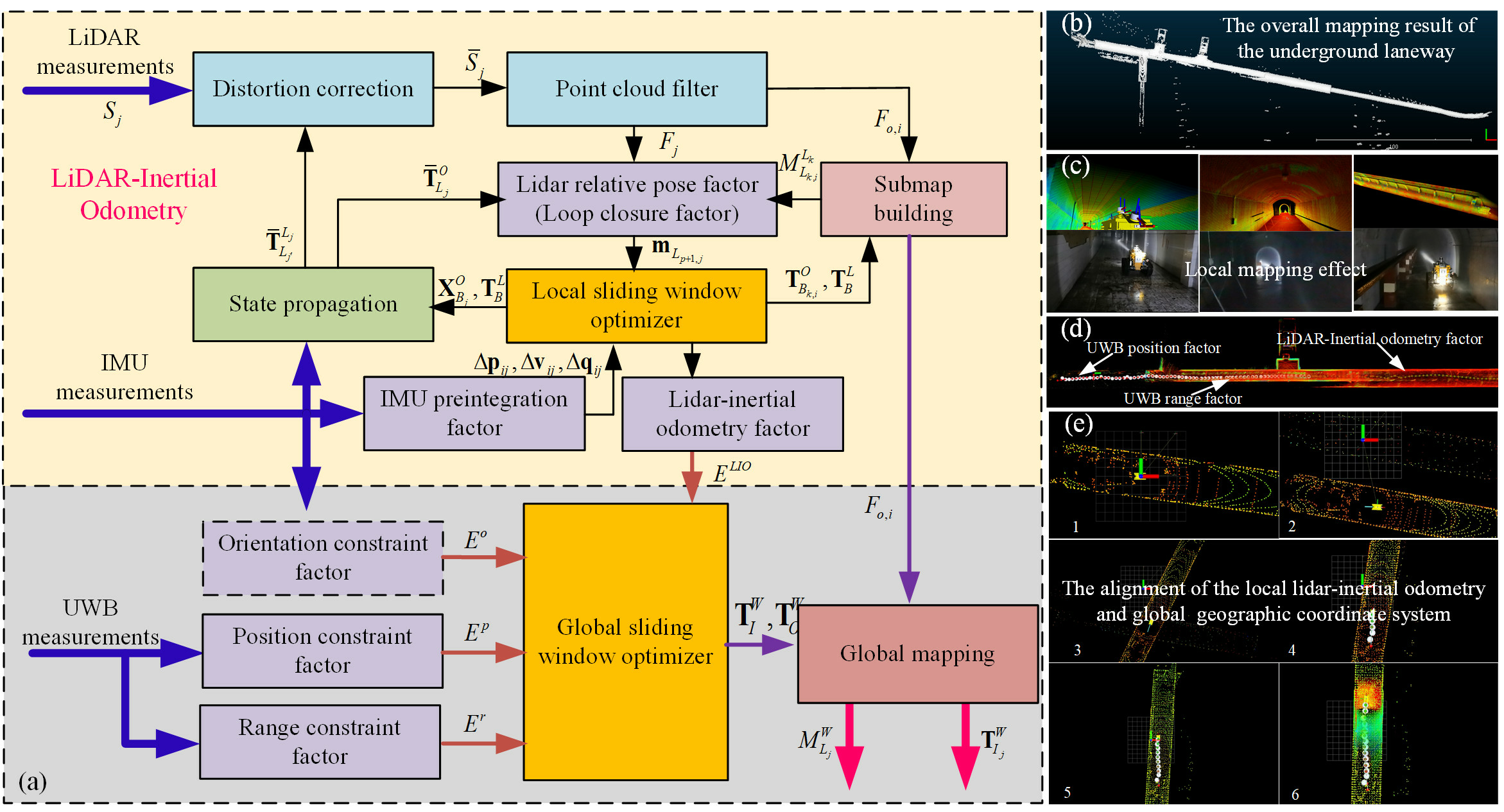
A Multimodal Robust Simultaneous Localization and Mapping Approach Driven by Geodesic Coordinates for Coal Mine Mobile Robots
Menggang Li, Kun Hu, Kun hu, Yuwang Liu, Eryi Hu, Chaoquan Tang, Hua Zhu, Gongbo Zhou Remote Sensing, 2023 [PDF] This paper proposes a multimodal robust SLAM method based on wireless beacon-assisted geographic information transmission and lidar-IMU-UWB elastic fusion mechanism (LIU-SLAM). In order to obtain the pose estimation and scene models consistent with the geographic information, the construction of two kinds of absolute geographic information constraints based on UWB beacons is proposed. |

|
Adaptive High-Resolution Dynamic Scanning System and Method for Deformation Monitoring of Underground Infrastructure
Menggang Li, Zhuoqi Li, Kun Hu, Kun hu, Eryi Hu, Chaoquan Tang, Gongbo Zhou TIM, 2025 [PDF] This paper presents an adaptive, high-resolution scanning method for deformation monitoring of coal mine sealing walls using a station-based LiDAR system. By fusing LiDAR, inertial, and encoder data, we developed a hierarchical framework for feature extraction, state estimation, and spatiotemporal registration of 3D point clouds. An adaptive scanning strategy—guided by a penalty function—dynamically optimizes point density and geometric fidelity during acquisition, while an equipment placement model tailors sensor positioning to the geometry and region of interest. We introduce two evaluation metrics: point cloud acquisition temporal density (PATD) and point cloud relative area error (PRAE). Experiments on a 1.08 m² wall achieved full coverage in 51.6 s at 1.68 m distance. Field tests on a 5 m² area under simulated deformation confirmed 3.59 m as the optimal monitoring distance and demonstrated reliable detection of centimeter-scale displacements. The system provides a practical solution for continuous structural health monitoring in confined underground spaces. |
|
|
|
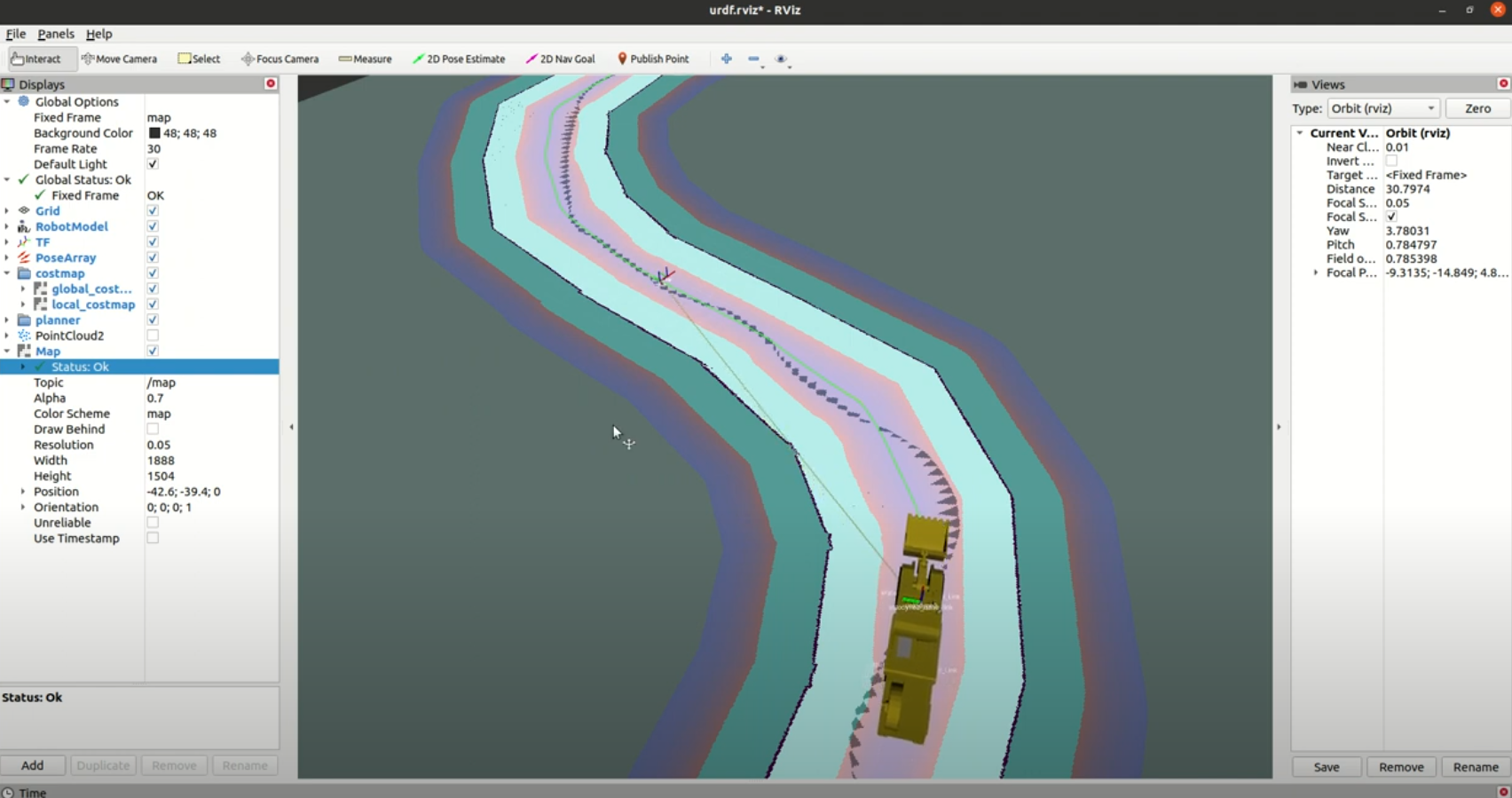
Autonomous Driving System of Load-Haul-Dump(LHD)
Kun Hu This project aims to create a model of a Load-Haul-Dump(LHD), perform modeling and simulation in Gazebo, and design corresponding modules for environmental perception, path planning, and path tracking control. |
|
|