
| Email |
Google Scholar |
|
I am a third-year Master's student in Mechanical Engineering at the CoalMine Robot Lab, China University of Mining and Technology (CUMT), advised by Prof. Menggang Li. Goal: Reliable robot perception, localization and navigation in extreme underground environments. Research Interest: The intersection of robust SLAM, multi-sensor fusion, and spatial AI. Research Question: How can we develop resilient localization and mapping systems capable of maintaining accuracy in feature-deprived and structurally dynamic underground environments? Ultimately, how can we establish reliable perception-action loops to deploy autonomous mining robots in highly hazardous conditions? Embodied AI & Robotics: I am passionate about building practical embodied agents that bridge robust perception and physical interaction, empowering autonomous robots to reliably navigate and manipulate in coal mines and other extreme industrial environments. Email: falloutlast888 [AT] gmail.com |
|
pdf |
abstract |
bibtex
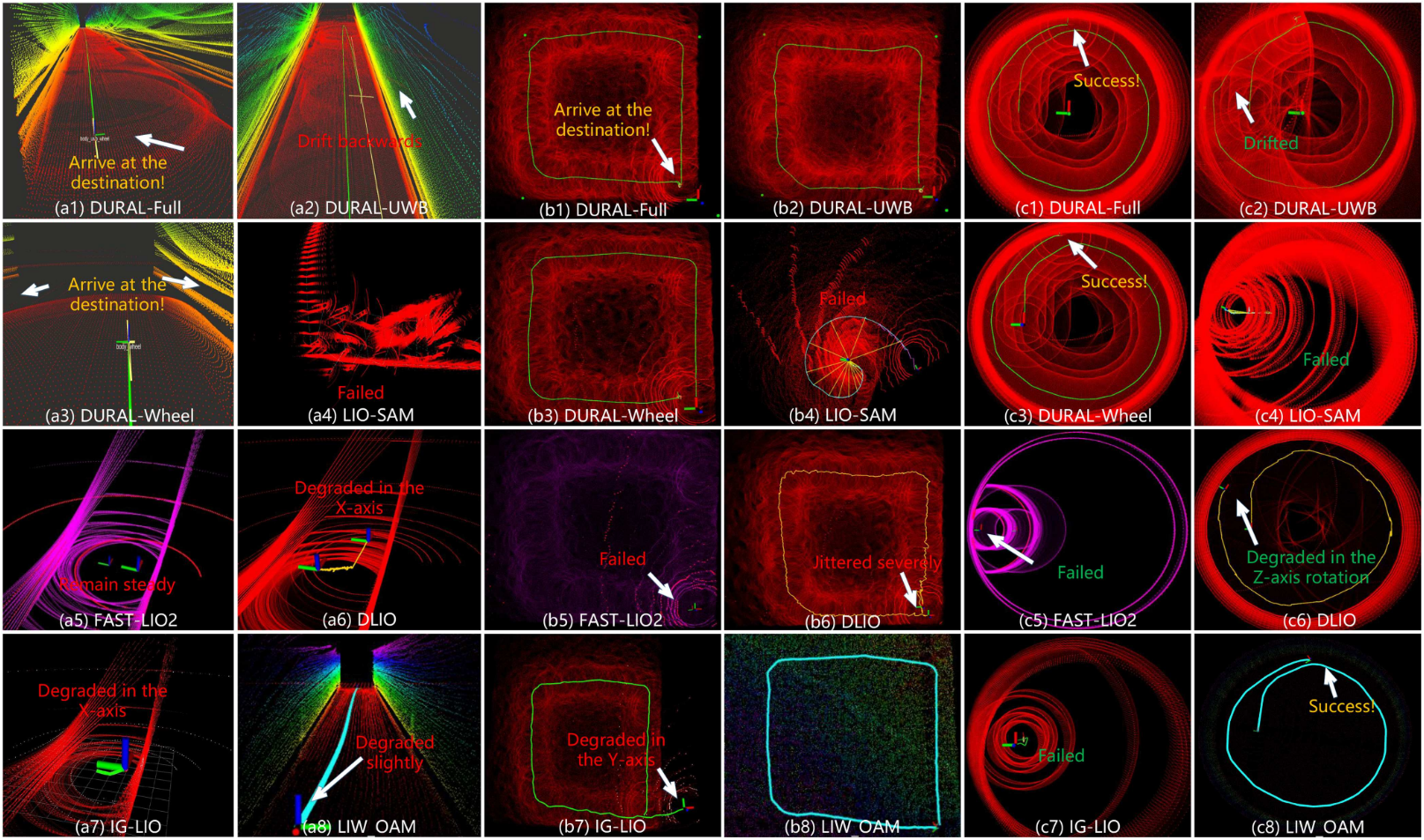
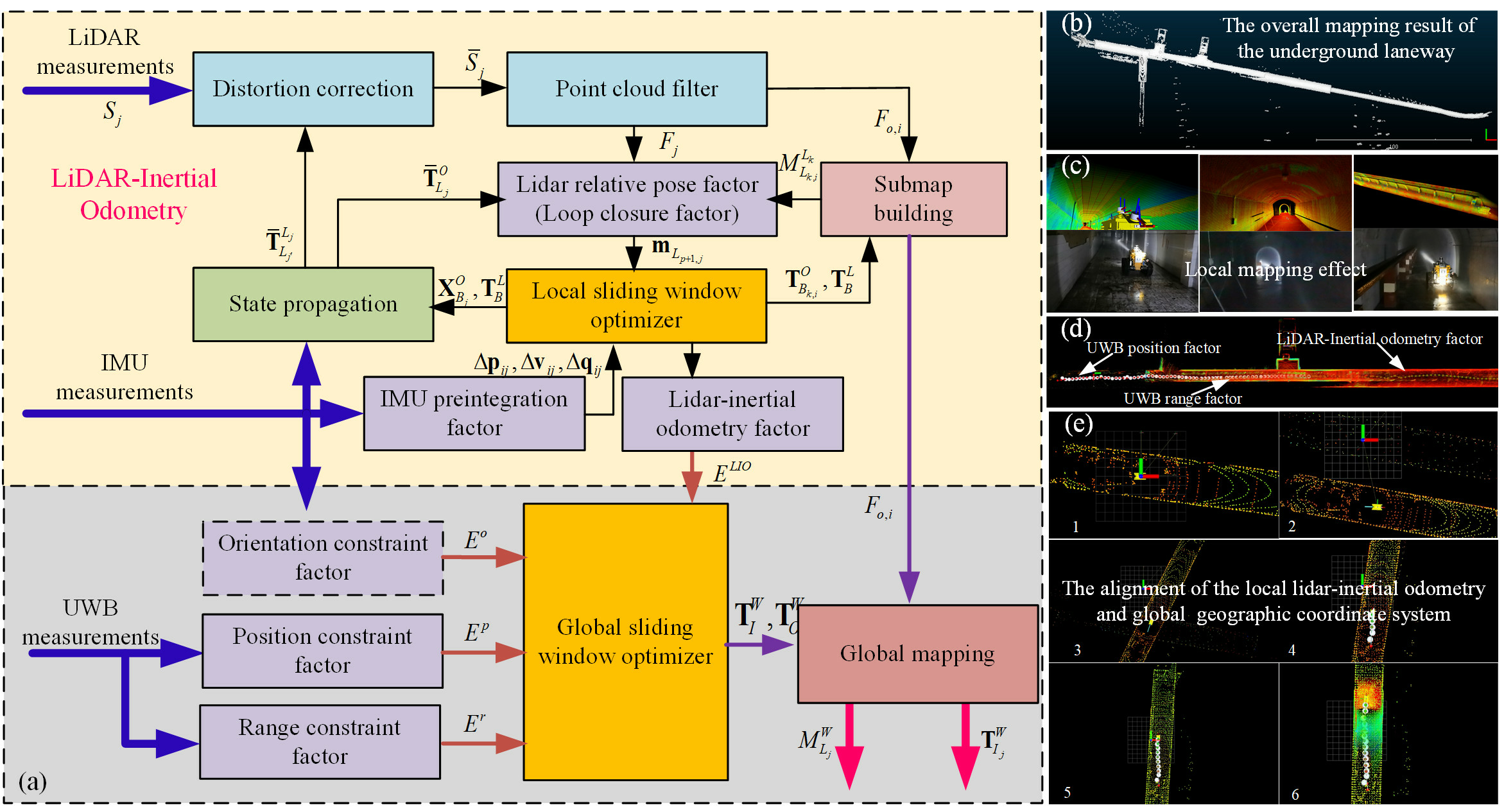
DURAL is a degradation-resistant adaptive localization framework for coal mine robots. It fuses LiDAR, IMU, UWB, and wheel odometry to achieve robust localization in GPS-denied, feature-degraded, and harsh underground tunnel environments. The system incorporates adaptive multi-model SLAM strategies to handle extreme degradation scenarios common in underground mining operations.
{dural2026,
author = {Hu, Kun and Li, Menggang and Jin, Zhiwen and Tang, Chaoquan and Hu, Eryi and Zhou, Gongbo},
title = {DURAL: Degradation-Resistant Robust Adaptive Localization by LiDAR-Inertial-UWB-Wheel Fusion for Coal Mine Robots},
journal = {Journal of Field Robotics},
keywords = {coal mine robot, degradation detection, fusion mode switching, LiDAR-inertial-UWB-wheel odometry},
doi = {https://doi.org/10.1002/rob.70200},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1002/rob.70200},
eprint = {https://onlinelibrary.wiley.com/doi/pdf/10.1002/rob.70200}}
|
|
webpage |
pdf |
abstract |
bibtex |
arXiv
Simultaneous Localization and Mapping (SLAM) in large-scale, GPS-denied coal mines is hindered by feature-poor tunnels, unreliable wheel odometry on rough terrain, and lack of global reference. To tackle these challenges, we present CM-LIUW-Odometry, a multimodal SLAM framework based on the Iterated Error-State Kalman Filter (IESKF). It tightly fuses LiDAR-inertial odometry with UWB for global alignment, integrates wheel odometry enhanced by nonholonomic constraints and lever-arm compensation for UWB-outage zones, and employs an adaptive motion-mode switching mechanism based on UWB coverage and environmental degradation. Real-world experiments show our method outperforms state-of-the-art approaches in accuracy and robustness.
@inproceedings{hu2025cmliuw, author={Hu, Kun and Li, Menggang and Jin, Zhiwen and Tang, Chaoquan and Hu, Eryi and Zhou, Gongbo},
booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={CM-LIUW-Odometry: Robust and High-Precision LiDAR-Inertial-UWB-Wheel Odometry for Extreme Degradation Coal Mine Tunnels},
year={2025},
volume={},
number={},
pages={7139-7146},
doi={10.1109/IROS60139.2025.11245914}
}
|
|
|
webpage |
pdf |
abstract |
bibtex |
arXiv
We propose a loosely coupled adaptive LiDAR-Inertial-Odometry named Adaptive-LIO, which incorporates adaptive segmentation to enhance mapping accuracy, adapts motion modality through IMU saturation and fault detection, and adjusts map resolution adaptively using multi-resolution voxel maps based on the distance from the LiDAR center.
@ARTICLE{zhao2025,
author={Zhao, Chengwei and Hu, Kun and Xu, Jie and Zhao, Lijun and Han, Baiwen and Wu, Kaidi and Tian, Maoshan and Yuan, Shenghai},
journal={IEEE Internet of Things Journal},
title={Adaptive-LIO: Enhancing Robustness and Precision Through Environmental Adaptation in LiDAR Inertial Odometry},
year={2025},
volume={12},
number={9},
pages={12123-12136},
keywords={Accuracy;Laser radar;Odometry;Motion segmentation;Simultaneous localization and mapping;Internet of Things;Robots;Feature extraction;Trajectory;Robustness;Adaptive;LiDAR inertial odometry (LIO);multiresolution map;SLAM},
doi={10.1109/JIOT.2024.3519533}}
|
|
|
pdf |
abstract |
bibtex
This paper proposes a multimodal robust SLAM method based on wireless beacon-assisted geographic information transmission and lidar-IMU-UWB elastic fusion mechanism (LIU-SLAM). In order to obtain the pose estimation and scene models consistent with the geographic information, the construction of two kinds of absolute geographic information constraints based on UWB beacons is proposed.
@Article{li2023rs,
AUTHOR = {Li, Menggang and Hu, Kun and Liu, Yuwang and Hu, Eryi and Tang, Chaoquan and Zhu, Hua and Zhou, Gongbo},
TITLE = {A Multimodal Robust Simultaneous Localization and Mapping Approach Driven by Geodesic Coordinates for Coal Mine Mobile Robots},
JOURNAL = {Remote Sensing},
VOLUME = {15},
YEAR = {2023},
NUMBER = {21},
ARTICLE-NUMBER = {5093},
URL = {https://www.mdpi.com/2072-4292/15/21/5093},
ISSN = {2072-4292},
DOI = {10.3390/rs15215093}}
|

|
pdf |
abstract |
bibtex
This paper presents an adaptive, high-resolution scanning method for deformation monitoring of coal mine sealing walls using a station-based LiDAR system. By fusing LiDAR, inertial, and encoder data, we developed a hierarchical framework for feature extraction, state estimation, and spatiotemporal registration of 3D point clouds. An adaptive scanning strategy—guided by a penalty function—dynamically optimizes point density and geometric fidelity during acquisition, while an equipment placement model tailors sensor positioning to the geometry and region of interest. We introduce two evaluation metrics: point cloud acquisition temporal density (PATD) and point cloud relative area error (PRAE). Experiments on a 1.08 m² wall achieved full coverage in 51.6 s at 1.68 m distance. Field tests on a 5 m² area under simulated deformation confirmed 3.59 m as the optimal monitoring distance and demonstrated reliable detection of centimeter-scale displacements.
@ARTICLE{li2025,
author={Li, Menggang and Li, Zhuoqi and Hu, Kun and Hu, Eryi and Tang, Chaoquan and Zhou, Gongbo},
journal={IEEE Transactions on Instrumentation and Measurement},
title={Adaptive High-Resolution Dynamic Scanning System and Method for Deformation Monitoring of Underground Infrastructure},
year={2025},
volume={74},
number={},
pages={1-15},
keywords={Monitoring;Deformation;Point cloud compression;Accuracy;Optical variables measurement;Coal mining;Three-dimensional displays;Safety;Measurement;Deformable models;Adaptive scanning strategy;deformation monitoring;dynamic;high resolution;underground infrastructure safety},
doi={10.1109/TIM.2025.3602599}}
|
|
International Conference on Intelligent Robots and Systems (IROS) 2025, 2026
Journal of Field Robotics (JFR) IEEE Internet of Things Journal (IOTJ) IEEE Transactions on Instrumentation and Measurement (TIM) |
|
|
Website template from Tairan He |